






















该案例来自NavVis
背景介绍
老旧小区改造对完善社区功能、加快城市基础设施建设现代化、提升老城区人居环境具有重要意义,同时也是我国的一项重大民生工程和发展工程问题。国家要求到“十四五”期末,力争基本完成2000年前建成的老旧小区改造任务。
老旧小区的改造已不再是传统的居家适老化改造和安装电梯问题,它具有范围大、面积广的问题,此外老旧建筑因年代久远,很多项目建筑资料丢失或信息不全,也给改造工作的开展造成了很大困扰。
传统的测量手段已经跟不上城市建设、更新的步伐。移动式三维激光扫描测量技术的应用,可以快速、轻松地获取老旧小区的实际现状,以最快的效率、最低的时间与人力成本完成改造工作。
项目需求与挑战
项目具体需求:
一个半月内绘制小区楼宇外立面制图,计算外立面面积,用于计算添加保温层所需材料量;
统计每户上下水管、燃气管的位置,依据图纸进行改造。
该项目位于北京市石景山区的共五个小区,上百栋楼宇的数据扫描采集工作。除却需要解决居民配合度问题,项目团队还要面临小区楼宇较多,户型繁杂,协调居民入户,甚至有的管线被包到墙里的测量难题。
解决方案
硬件:NavVis VLX移动三维激光扫描仪
NavVis VLX移动三维激光扫描仪 ,采用业内领先的SLAM算法,在500m2的测试环境下精度可达6mm。它可以快速进行空间数据的捕获,全面地获取目标对象数据。凭借实时、高精度、数字化等特点,为图纸绘制、立面测量、精准核算等提供数据支撑。

软件:NavVis IVION、制图软件
将VLX扫描的数据上传IVION可显示全景图像数据和二维地图,让用户对扫描完成区域的空间数据信息了如指掌,将获取的点云数据导入制图软件进行辅助绘制建筑图纸,省去了现场反复确认建筑信息的环节,大大提高了工作效率。
方案实施关键步骤:
主要分为外业数据采集以及业内数据整理两个板块:

外业数据采集:
(1) 扫描环境确认:周围环境以及小区楼宇审视,提前确认扫描路径;
(2) 外业扫描培训:扫描开始前,统一进行项目培训,说明扫描要求和制图要求;
(3) 外业扫描人员采集激光点云数据:按照扫描路径,完成小区O型闭环提高数据采集精度;
(4) 核对扫描结果:在VLX显示屏上查看扫描数量与计划数量是否一致;以便调整;及时补充未采集区域数据;


▲外业采集现场图
业内数据处理:
(1)数据导出:从设备导出的数据无须点云配准,导出即用。
(2)内业制图:形成文档性资料,制定统一标准;依据点云及实际情况,使用制图软件绘制楼宇立面图及分户平面图
(3)图纸质检:制作制图要求文档,
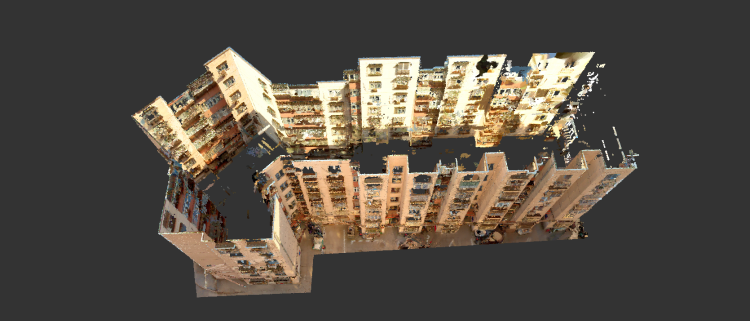
VLX点云

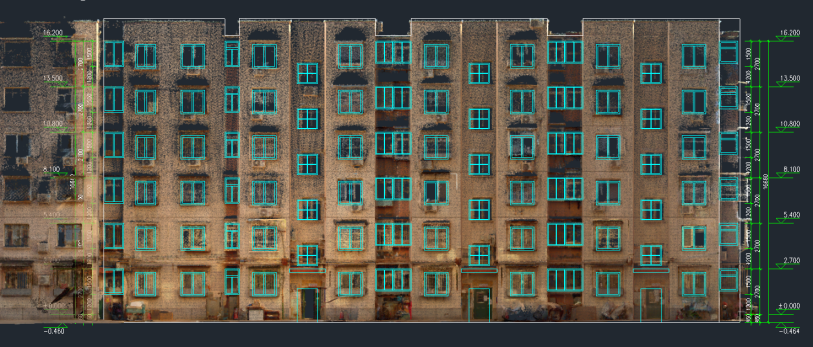
点云制图

价值收益
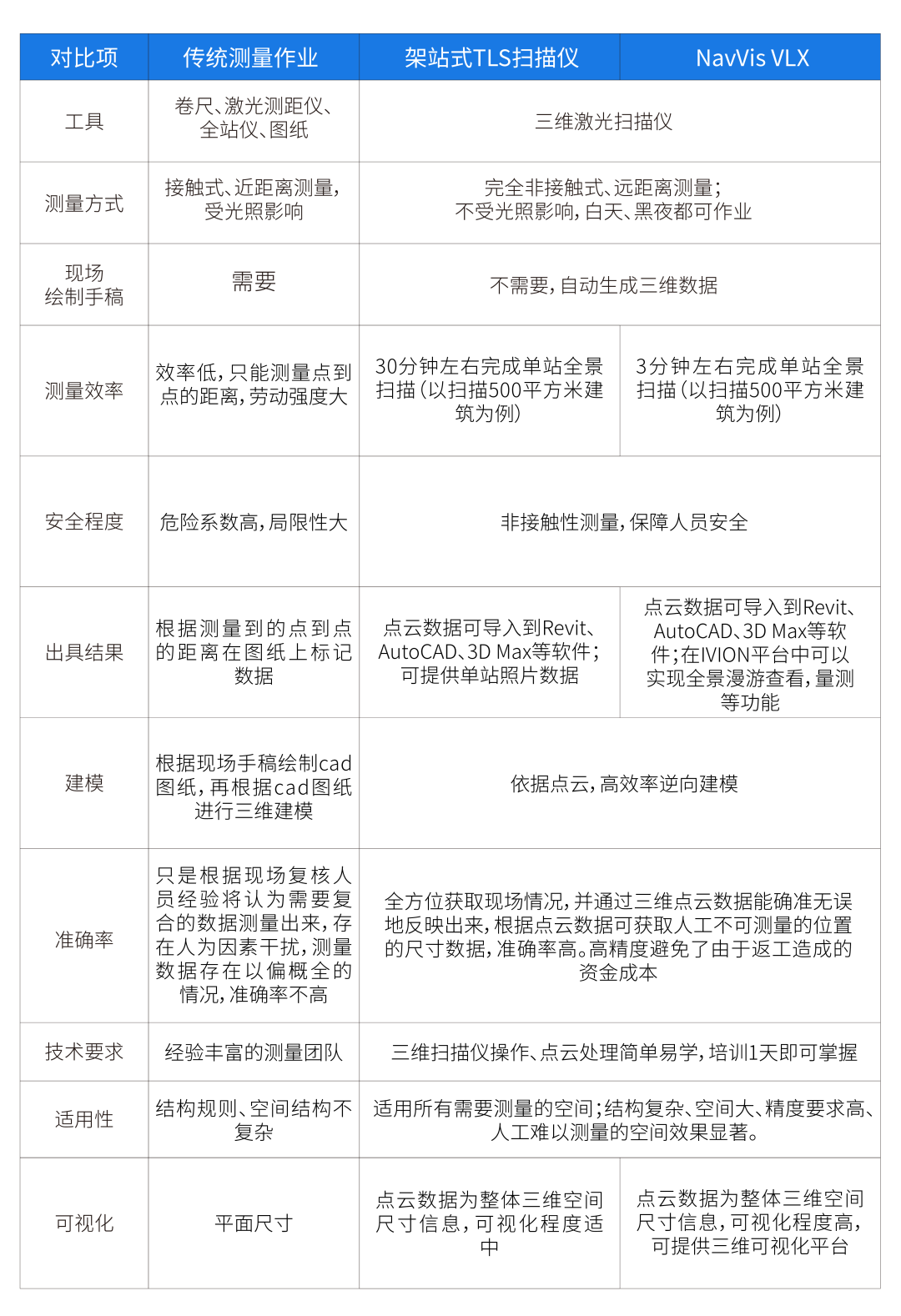
采用NavVis VLX移动三维激光扫描仪,历时一周就完成了北京市石景山区的五个小区,百栋楼宇的数据采集和整理,比传统的架站式TLS扫描仪快10倍有余。

▲对比表
优势:
(1)时态化留存实景场景;让实景场景停留在某时某刻,为老旧小区化改造保留真实可靠的原始实景三维数据;
(2)高精度的实景三维模型:能为老旧小区改造规划方案及决策提供现实依据;
(3)可视化、可量测、改造前后可对比:可应用于施工管理、结算审计,减少了项目各参与主体方的争议;
(4)快速精准,有图有真相:配合制图软件的软件应用,使得老旧小区采集数据快速可视化建模呈现;与传统测量相比,减少了人力物力,缩短了测量工期,为设计方案、投标方案争取更多的时间;
更多详细内容,欢迎来询......
沪敖3D是一家致力于三维数字化行业解决方案的技术型企业,拥有丰富的三维项目经验,公司以行业应用为出发点,为客户提供三维数字化采集、三维数据处理、三维数据管理等一系列应用服务。
沪敖3D拥有结构光拍照式三维扫描仪、手持三维扫描仪(大小空间)、地面三维激光扫描仪、无人机倾斜摄影测量、3D打印等多种技术手段,从几厘米到几百米的物体或三维空间,从几个微米到几个厘米的精度,沪敖均可提供涵盖软硬件产品和项目服务的完整解决方案。
沪敖3D目前主要服务于制造业(汽车、航空航天、船舶、模具、铸造以及各种机械)、建筑业(建筑设计、施工、装修等)、文化遗产(博物馆、古建筑、考古等)、数字化工厂、警用公共安全、影视制作、教育等行业。提供质量检测、三维建模、逆向工程、数字存档、GD/T分析、有限元分析、虚拟安装、干涉分析、工程测绘、形变监测、3D打印等技术方案。
