






















以下文章来源于内芬兹NavVis ,作者NavVis
NavVis VLX作为移动扫描领域的标杆产品,其数据精度一直是客户关注的重点,今天我们就一起来看看NavVis是如何评估VLX的数据精度的。
评价一款测绘设备的精度时,我们总是将其与业内公认的更高精度的设备的测量值做比较,在传统测绘领域,全站仪的精度是业内公认的;在三维激光扫描领域,架站式扫描仪(TLS)的数据被认为是高于移动式扫描仪的。那么我们就将全站仪和TLS的测量数据作为精度的参考基准,通过对比来评价VLX的扫描数据。
需要说明的是,移动扫描仪的数据精度与测量环境有关,所以声称某移动扫描设备达到了一个通用的精度是不负责任的。NavVis则通过不同的场景进行精度分析。
与全站仪的对比分析
早在2020年VLX 1发布之后,NavVis就对VLX 1在室内的扫描精度做了全面的分析,针对一个小型办公室场景,我们使用高精度全站仪测量并制作了CAD模型,然后在CAD模型中进行手动测量(在下方图中用黑色数字表示测量值),然后在点云模型中测量同一位置(在下方图中用蓝色数字表示测量值);并标注两组数据的偏差(在下方图中用红色数字表示)。
考虑局部(一个房间内)精度时,如图1所示, 在24个测量值中,22个测量值的偏差小于5mm;2个测量值的偏差在6-10mm之间。
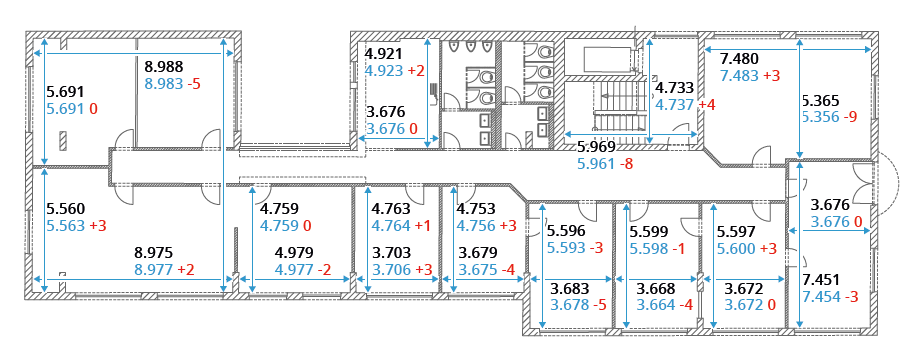
图1 局部精度对比
考虑全局(多个房间或整体模型)精度时,如图2所示,7个测量值中,3个偏差小于5mm,2个偏差在6-10mm之间,2个在11-15mm之间。
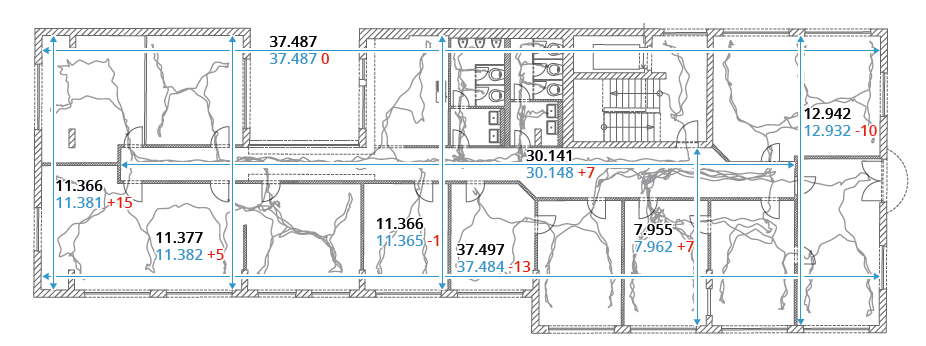
图2 全局精度对比
表1统计了所有的测量值对比结果,这样的对比方式非常直观,在既有建筑的平面图制作或者模型创建时可以提供准确的尺寸参考。例如,如果建模人员根据点云建立了一个5米乘5米的房间模型,他们可以很有把握的说,这个模型的误差在5mm以内。
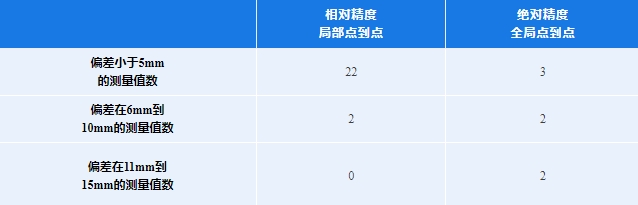
表1 局部和全局测量分析表
然而,在点云和CAD模型中
手动测量的方式未能充分利用到所有的点
其测量值的数量较少
也就是说采样率较低
要知道,一个点云模型可是由
几千万到几亿甚至几十亿个点组成
我们能不能利用更多的数据
做更全面的分析呢?
当然可以!我们可以利用
与TLS的点云数据做云对云的对比
↓↓↓
与TLS的对比分析
01
室内场景
对比之前,我们有必要介绍一下TLS是如何表述精度的,当我们提到TLS的精度时,我们指的是单个位置离散测量值的精度。对于一个站点的扫描,TLS的规格表通常会提到与标准偏差相关的置信度,通常是1西格玛,即置信度为68%,有时是2西格玛,即置信度为95%。
我们可以举个例子来帮助大家理解,如果说标准偏差为5毫米,置信度为1西格玛或68%,这意味着在所有的测量结果中,68%的测量必须在5毫米的精度范围内。
在对VLX 1和VLX 2的精度分析中,均使用了业内领先的TLS对同一室内场景进行了扫描,本文中我们着重讲解VLX 2的精度分析方法。针对VLX 2扫描的同一个数据集,我们采取了两种不同的处理方式:
➡️
一种是使用控制点(CP)将点云注册到指定坐标系但是不做精度优化;
➡️
另一种使用控制点将点云注册到指定坐标系的同时优化了点云精度;
然后将TLS扫描的点云模型作为精度基准来进行全面的计算对比,对比结果代表了VLX 2的绝对精度。
在分别使用TLS和VLX 2对图3的办公室进行扫描获取点云模型后,我们使用一个内部工具对比点云模型。

图3. 办公室点云模型
图5表示了TLS点云与NavVis VLX 2点云之间偏差的累积分布情况。可以看到,在不使用控制点优化精度的情况下,68%的测量值是低于5.1mm的,95%的测量值是低于12.9mm的;在使用了控制点优化精度后,68%的测量值低于4.5mm, 95%的测量值低于12.7mm。
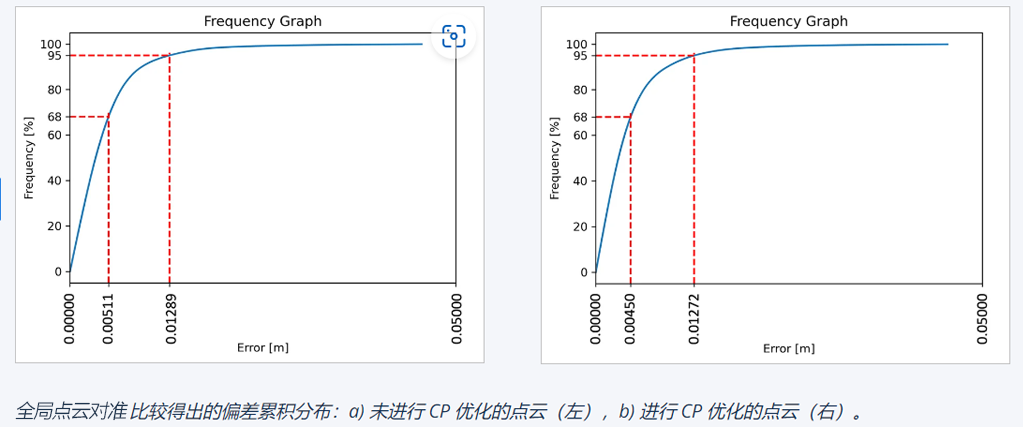
图5
相比与手动的测量对比,点云与点云的对比更加全面,从图5的对比结果来看,以TLS的数据作为精度基准时,我们可以说:
在不使用控制点优化精度的情况下,VLX 2的绝对精度在68%的可信度下是小于5.1mm的;在95%的可信度下是小于12.9mm的。
在使用控制点优化精度后,VLX 2的绝对精度在68%的可信度下是小于4.5mm的;在95%的可信度下是小于12.7mm的。

表 2
值得注意的是,在这样一个室内办公室场景中,即使不使用控制点优化,VLX 2的绝对精度与使用了控制点优化的精度也相差无几,所以我们有理由相信,在类似的环境中,NavVis VLX 2完全可以在无控制点的情况下为客户提高精度的数据。
02
室外场景

尽管VLX 2的设计初衷是数字化室内空间,随着技术发展和客户需求增加,VLX 2也针对室外环境优化了扫描算法,我们一起来看看其在室外扫描的精度表现,选择一个建筑的外立面,长31.3m,高20.3m。同样以高精度TLS扫描点云作为精度基准,与VLX 2扫描的点云做全局对比。结果如图7所示:

图7 外立面全局点云对比
在扫描外立面时,越高的地方离扫描仪越远,获取的点数量越少,精度也随之下降。所以我们可以更深入地分析不同高度区间内VLX 2的精度表现。为了排除地面移动物体的干扰,我们将外立面分为三个高度区间,1.55m-7.8m,7.8m-14.05m, 14.05m-20.3m, 结果如下:
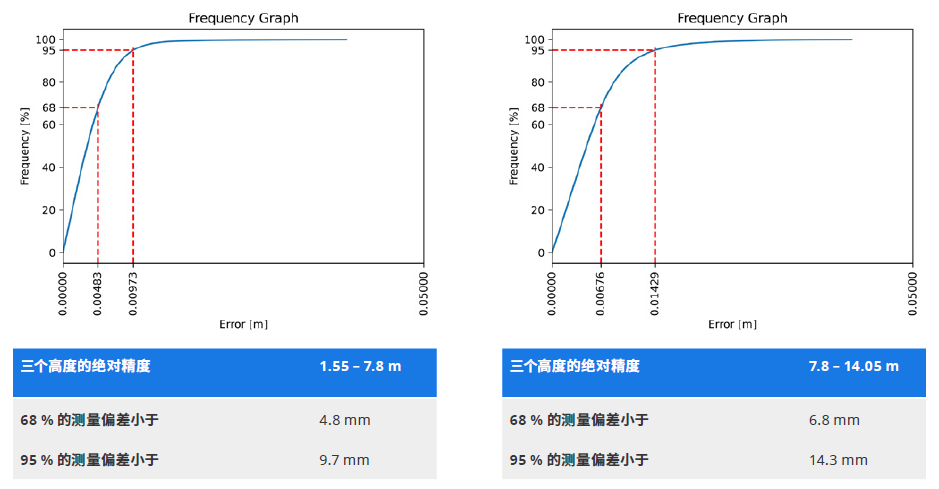
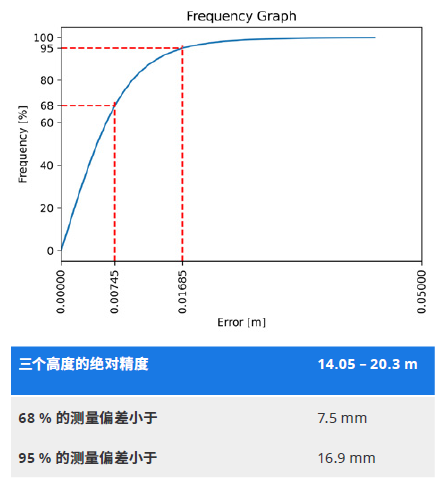
从分区的对比结果来看,VLX 2在外立面低区的精度与室内的扫描精度相当,在中区和高区略为衰减,这样的精度表现在移动扫描领域无疑是领先的,为既有建筑BIM建模提供坚实的基础。
本文介绍了NavVis在分析自身产品(VLX 1, VLX 2)精度时采用的分析方法和在不同场景下达到的精度。更多的分析细节,大家可以查阅NavVis官网提供的精度白皮书,今后,我们将继续对其他建筑环境进行研究测量,并从长远来看,我们将把这种精度评估的范围扩展到具有挑战性的户外场景,如森林、公园和人工结构较少的开放区域。
资料参考:
VLX 1 精度白皮书:NavVis VLX 1精度白皮书
VLX 2 精度白皮书:NavVis VLX 2精度白皮书
